7:00 – 8:00, 8:30 -3:30 Research
- But first, we update IntelliJ…
- The goal today is to get boids to set up the methods that control behavior:
- Alignment: steer towards the average heading of local flockmates
- Cohesion: steer to move toward the average position of local flockmates
- Separation: steer to avoid crowding local flockmates
- I’m not sure about this one. In the case of a belief system, there really isn’t a need for collision avoidance.
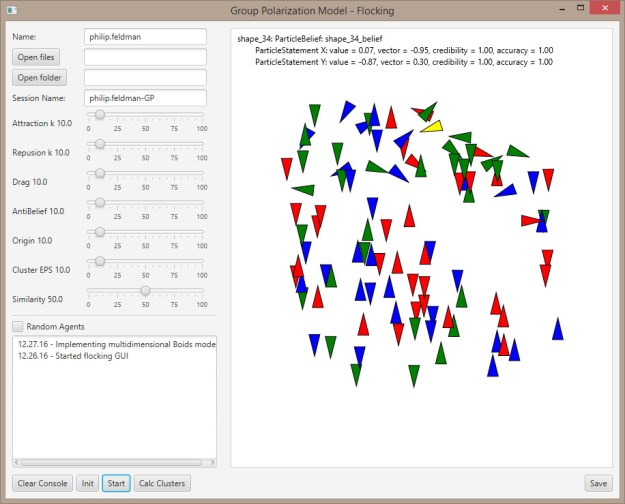
- Finishing ParticleBelief.interpolateHeading().
- Changed the vector so that it is always unit, and added speed variable for the particle belief