Two purposes – understanding the SoA, and finding a gap. This requires critical thinking, and an understanding of the problems, not just appeals to authority
Truthiness != trustworthiness
Wikipedia, Google, GScholar, and Elicit
Also blog posts, videos, etc.
Look at cites. Large counts are good! Search within citing
Look at authors. Sort by date. Is this recent?
Look for survey papers
Finding terms to search on is hard. Do not assume that you have the right ones at first.
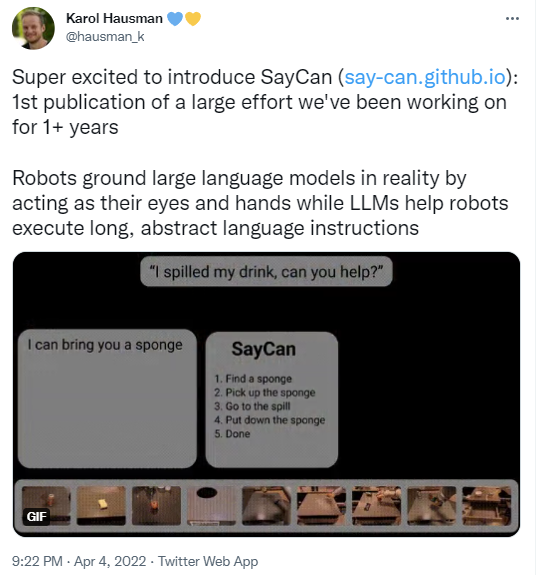
Language model networks
Code generation
The subclassed code works!
Working on executing Python within python. It’s surprisingly easy. You can import the file/class, and then refer to it:
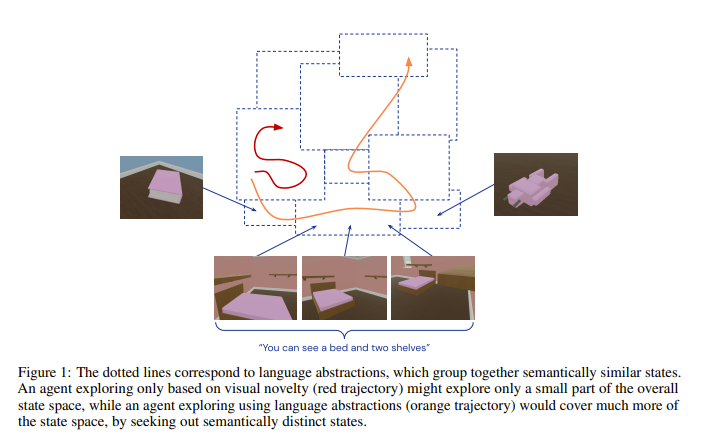
Continuous first-person 3D environments pose unique exploration challenges to reinforcement learning (RL) agents because of their high-dimensional state and action spaces. These challenges can be ameliorated by using semantically meaningful state abstractions to define novelty for exploration. We propose that learned representations shaped by natural language provide exactly this form of abstraction. In particular, we show that vision-language representations, when pretrained on image captioning datasets sampled from the internet, can drive meaningful, task-relevant exploration and improve performance on 3D simulated environments. We also characterize why and how language provides useful abstractions for exploration by comparing the impacts of using representations from a pretrained model, a language oracle, and several ablations. We demonstrate the benefits of our approach in two very different task domains — one that stresses the identification and manipulation of everyday objects, and one that requires navigational exploration in an expansive world — as well as two popular deep RL algorithms: Impala and R2D2. Our results suggest that using language-shaped representations could improve exploration for various algorithms and agents in challenging environments.
Tasks
Mulch and edging
Fortunately, taxes are already done!
Maybe get started on chores
SBIRs
Send text to JHU – done! But they aren’t going for it
Code generation
Made some buttons that trigger non-functional callbacks
Moved some text around to the beginning GPT interview and took it out of the influence/dominance/attention section. I had to rework that a bit to include egalitarianism and inverse dominance
Trying to figure out how to finish up the deep bias chapter. I’d like to do something that shows how these patterns play out in modern politics. Maybe the difference between suppression and cancelling
1:00 Meeting! It went well, I think. KH is a textbook company, so it’s probably not a good fit but 1) I found a way to talk to publishers! and 2) They will take a look at the proposal and make suggestions (maybe?)
Starting to finish up Deep Bias chapter. Maybe move it to the front? My thinking is to introduce the human tension between hierarchy and egalitarianism, then communication technology (phase locking), then iteratively revisit?
SBIRs
Meeting with Steve – done
Sprint planning – done
Write up notes from yesterday
Set up MDA meeting for next week?
GPT-Agents
3:30 Meeting
Since ASRC is unwilling to be lead, do we write a proposal? Find a lead?
I had an interesting dream last night. Someone had invented a type of hybrid self driving car. It used a joystick, that could be set for left or right handed people. In manual mode, it worked like a regular joystick – forward accelerates, left and right steer, backwards brakes or reverses. In “self driving” mode, the joystick had nine detents. Pushing it into the fwd detent would autodrive in a lane. Nudging left or right would set up lane changes.
In city driving, putting it in the side detents would set up signaling and sensors for a turn. Going forward into one of the corners would initiate the turn. Parking was initiated by pulling up next to a space and then using the rear corner detent. It was a pretty cool system. I think in the dream the system was prototyped by the child of Mexican field workers who prototyped it on their parent’s pickup truck.
Tasks
Call Aluminess – done! Ships by the end of the week?
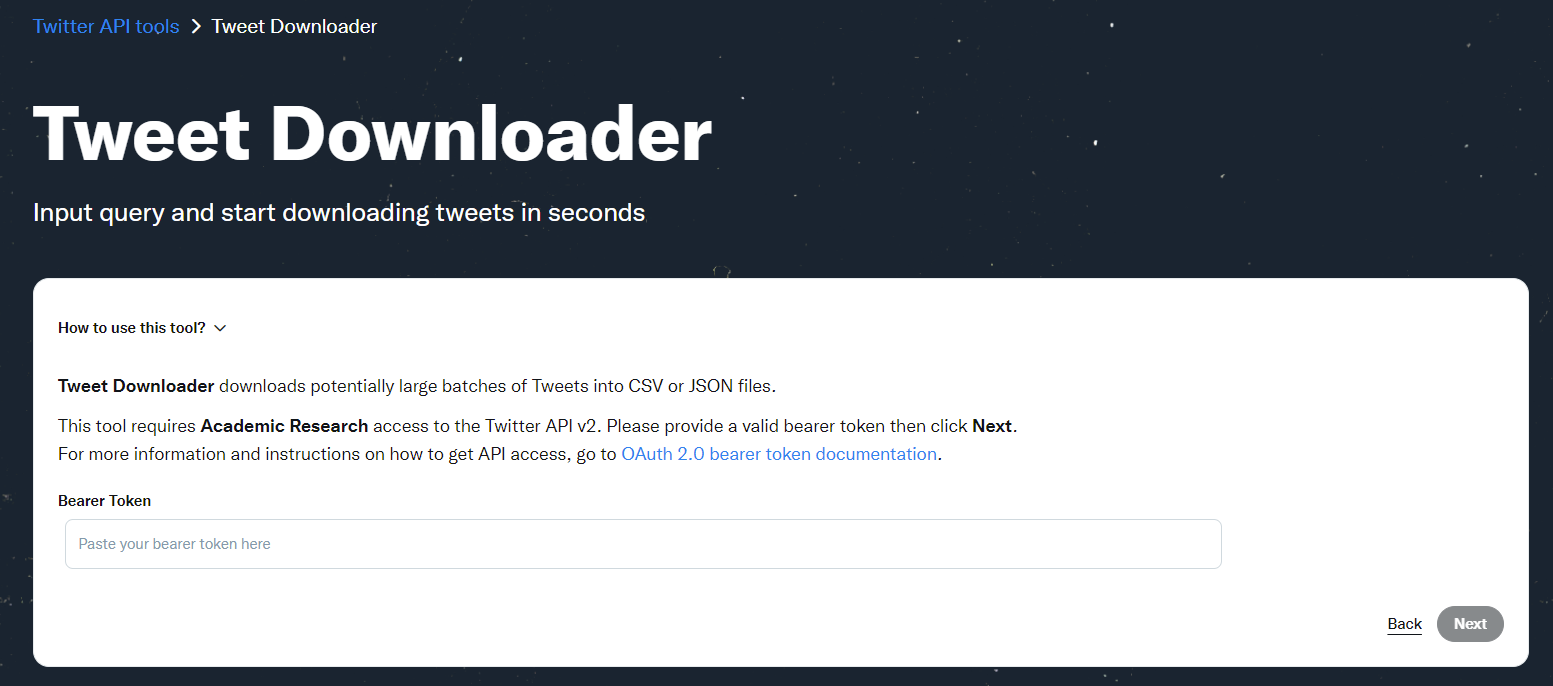
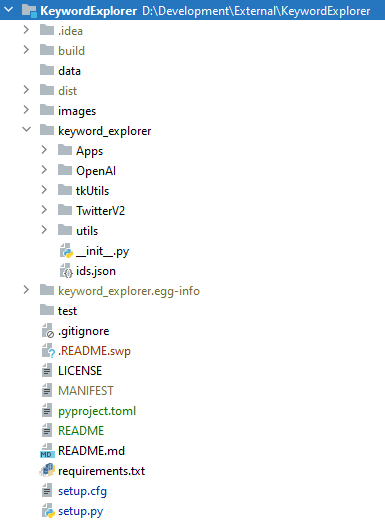
Work some more on deploying Keyword Explorer – done! Here’s how you deploy using JetBains PyCharm
First, make sure you have up-to-date versions of setuptools and twine. Also make sure your directory looks something like this:
Create your setup.cfg file
[metadata]
description-file = README.md
name = keyword_explorer
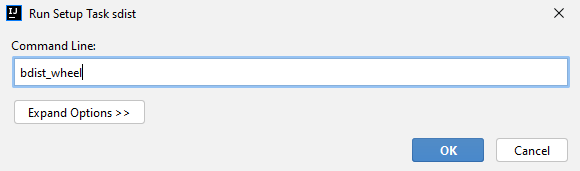
Then, your setup.py file. It is important to explicitly list the subdirectories in the packages array. Here’s my example (Note that “long_description) is a variable. It is what PyPI uses to create its description, and needs to be updated before creating the wheel. (see here for an example):
from distutils.core import setup
setup(
name='keyword_explorer',
version= "0.0.3.dev",
packages=['keyword_explorer',
'keyword_explorer.utils',
'keyword_explorer.TwitterV2',
'keyword_explorer.tkUtils',
'keyword_explorer.OpenAI',
'keyword_explorer.Apps'],
url='https://github.com/pgfeldman/KeywordExplorer',
license='MIT',
author='Philip Feldman',
author_email='phil@philfeldman.com',
description='A tool for producing and exploring keywords',
long_description= long_s,
install_requires=[
'pandas~=1.3.5',
'matplotlib~=3.2.2',
'numpy~=1.19.5',
'sklearn~=0.0',
'scikit-learn~=0.24.2',
'requests~=2.27.1',
'wikipedia~=1.4.0',
'openai~=0.11.5',
'networkx~=2.6.2',
'tkinterweb~=3.12.2'],
classifiers=[ # Optional
# How mature is this project? Common values are
# 3 - Alpha
# 4 - Beta
# 5 - Production/Stable
'Development Status :: 3 - Alpha',
"Programming Language :: Python :: 3",
"License :: OSI Approved :: MIT License",
"Operating System :: OS Independent",
],
)
NEW! As of June 1, 2023, PyPi requires 2FA and tokens to upload:
Set your username to __token__
Set your password to the (long!) token value, including the pypi- prefix (e.g. pypi-AgEIcHl…)
Where you edit or add these values will depend on your individual use case. For example, some users may need to edit their .pypirc file, while others may need to update their CI configuration file (e.g. .travis.yml if you are using Travis).
Advanced users may wish to inspect their token by decoding it with base64, and checking the output against the unique identifier displayed on PyPI.
Moved interview with a biased machine to the front of the book since it could be a nice attention grabber
Started on the Egalitarianism section
Added some stuff to the technology section – Paleolithic and Early modern Human technologies. I’ll probably move the Paleolithic tech to the Egalitarianism section since it explains a lot about that behavior and the amount of evolutionary adaptation that took place around it. We do not look like the other great apes. This is why.
SBIRs
Good chat with Steve. Suggested how to create and visualize multiple attribute maps to see how the loss function is working
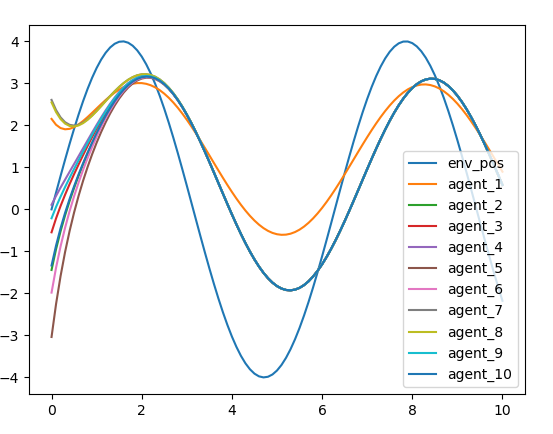
Worked out next steps with Rukan:
try predicting more than one point
try sine wave
loss function over 256 collecting loss, but maybe try 16 or some smaller number first
try to train for better convergence to see if it fixes the indexing issue
fix the indexing issue
try pytorch hyperparameter optimizer, probably just LR
What is morality? And to what extent does it vary around the world? The theory of “morality-as-cooperation” argues that morality consists of a collection of biological and cultural solutions to the problems of cooperation recurrent in human social life. Morality-as-cooperation draws on the theory of non-zero-sum games to identify distinct problems of cooperation and their solutions, and it predicts that specific forms of cooperative behavior—including helping kin, helping your group, reciprocating, being brave, deferring to superiors, dividing disputed resources, and respecting prior possession—will be considered morally good wherever they arise, in all cultures. To test these predictions, we investigate the moral valence of these seven cooperative behaviors in the ethnographic records of 60 societies. We find that the moral valence of these behaviors is uniformly positive, and the majority of these cooperative morals are observed in the majority of cultures, with equal frequency across all regions of the world. We conclude that these seven cooperative behaviors are plausible candidates for universal moral rules, and that morality-as-cooperation could provide the unified theory of morality that anthropology has hitherto lacked.









You must be logged in to post a comment.