
7:00 – 5:00 ASRC GOES
- Dissertation
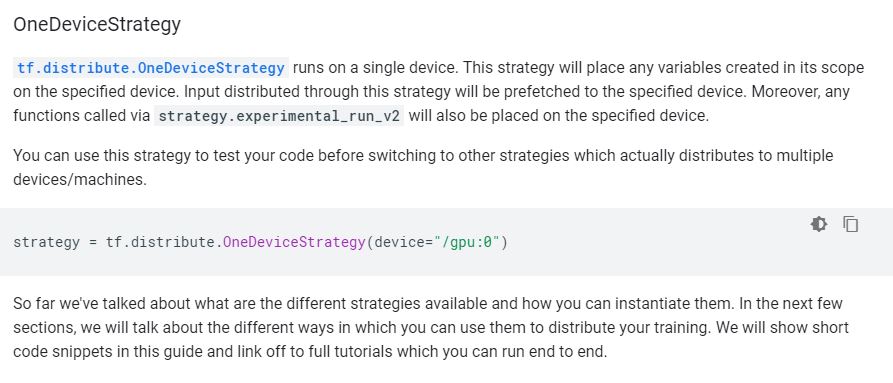
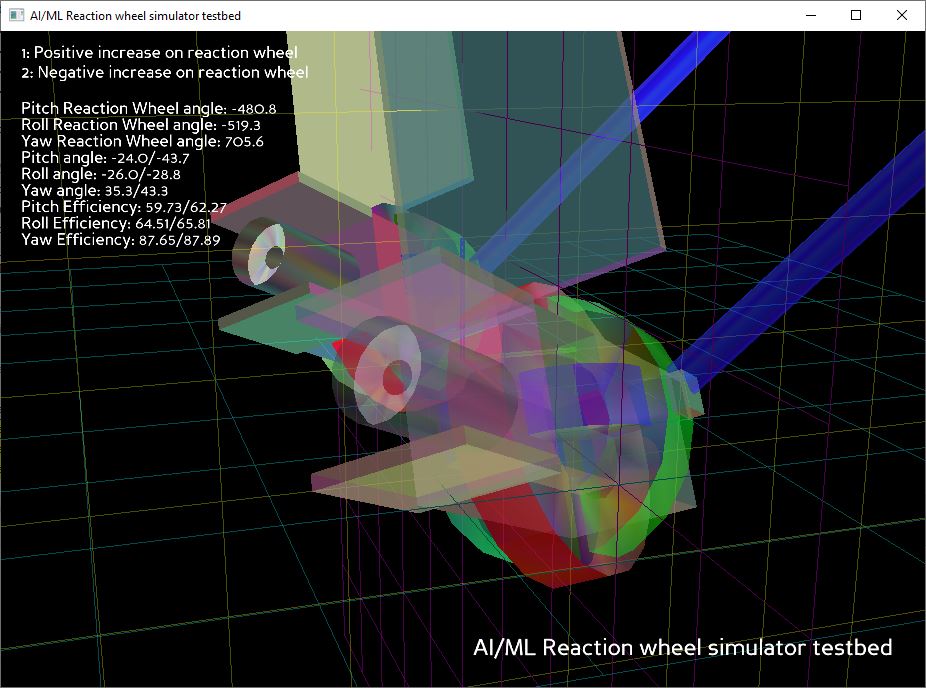
- ML+Sim
- Save actual and inferred efficiency to excel and plot
- Create an illustration that shows how the network is trained, validated against the sim, then integrated into the operating system. (maybe show a physical testbed for evaluation?)
- Formation control testbed (1)(2)
- SmallSat Dynamics Testbed (SSDT)
- A 3-DoF Experimental Test-Bed for Integrated Attitude Dynamics and Control Research
- Demo at the NSOF
- Went ok. Next steps are a sufficiently realistic model that can interpret an actual malfunction
- Put together a Google Doc/Sheet that has the common core elements that we can model most satellites (LEO, MEO, GEO, and HEO?). What are the common components between cubesats and the James Webb?
- Detection of station-keeping failure is a possibility
- Also, high-dynamic phases, like orbit injection might be low-ish fruit
- Tomorrow, continue on the GPU assignment in the evolver










You must be logged in to post a comment.