
GPT-2 Agents
- Good meeting last night. The next action items are to
- Figure out how to build embeddings from generated tweets
- Finish updating database
- Create new training set
- Train small and medium models using current and compact meta frame (something like [[month, location, retweets]], or some similar easy regex)
- Need to register for Emerging Techniques forum: mors.org/Events/Workshops/Emerging-Techniques-Forum
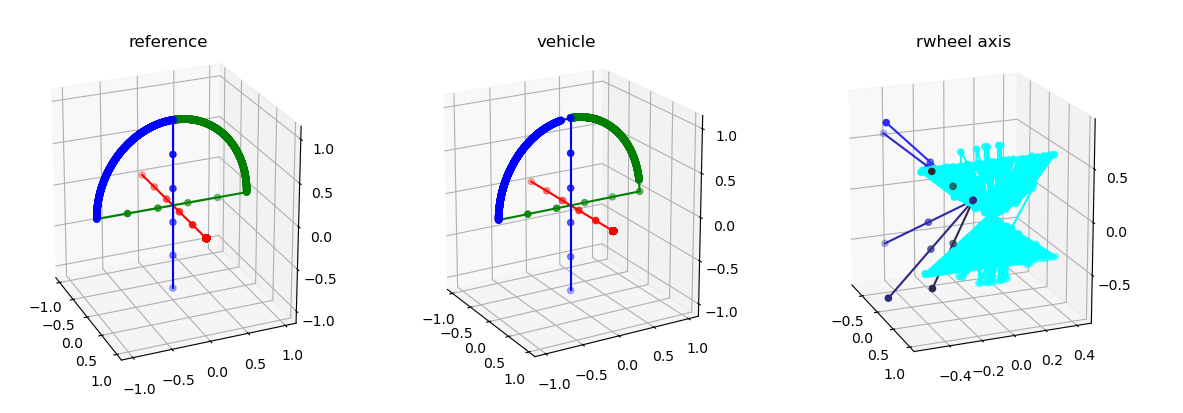
GOES
- Need to fix the angle rollover in vehicle (and reference?) frames. I don’t think that it will fix anything though. I just don’t get why the satellite drifts after 70-ish degrees:

- There is something not right in the normal calculation?

- I think the problem is going to be here. Need to dig into this in a scratch file:
def get_angle(self, v1:Tuple, v2:Tuple) -> [float, float]:
dot = np.dot(v1, v2)
v1norm = np.linalg.norm(np.array(v1))
v2norm = np.linalg.norm(np.array(v2))
v1n_v2n = v1norm*v2norm
normdot = np.divide(dot, v1n_v2n)
# r_angle = np.arccos(np.clip(dot, -1.0, 1.0))
r_angle = np.arccos(normdot)
d_angle = math.degrees(r_angle)
# print("rads = {}, degrees = {}".format(r_angle, d_angle))
return r_angle, d_angle
- The small angle steps seem to also be causing a problem:
- Need to finish my telecommute form
Book
- Writing cults section.
