The goal of the blog post is to give an in-detail explanation of how the transformer-based encoder-decoder architecture models sequence-to-sequence problems. We will focus on the mathematical model defined by the architecture and how the model can be used in inference. Along the way, we will give some background on sequence-to-sequence models in NLP and break down the transformer-based encoder-decoder architecture into its encoder and decoder part. We provide many illustrations and establish the link between the theory of transformer-based encoder-decoder models and their practical usage in 🤗Transformers for inference. Note that this blog post does not explain how such models can be trained – this will be the topic of a future blog post.
JuryRoom
Need to respond to Tony’s email. Talk about how text entropy works at the limit: “all work and no play make Jack a dull boy” at one end and random text at the other. Different populations will produce different probabilities of (possibly the same) words. These can further be clustered using word2vec. Additionally, doc2vec could cluster different rooms.
Book
More work on the Money section. Set up discussion in the emergence section as what happens once money is established
7:00 Drinking with historians is going to cover “patriotism”. This might tie into dimension reduction and cults. Going to see if it’s possible to ask questions
GOES
Still thinking about the hiccup in the calculations. Maybe test for which of the four vectors (X, Y, Z, and combined) that’s closest to the previous vector and choose that?
Finish creativity section in Money, start on Cults
GOES
I think what I want to try is to sum all the vectors, based on the normalized total swept area. That becomes the synthesized rotation vector. Keep that rather than a VecData object.
Well, instead of just keeping the vector, I create and maintain a current_vd VecData object since it has all the rotation math in it. The results are significantly better!
On vacation riding around the Maryland Eastern Shore, but I’m also trying to see if I can connect the ML concept of attention to population scale thinking
Current state-of-the-art machine translation systems are based on encoder-decoder architectures, that first encode the input sequence, and then generate an output sequence based on the input encoding. Both are interfaced with an attention mechanism that recombines a fixed encoding of the source tokens based on the decoder state. We propose an alternative approach which instead relies on a single 2D convolutional neural network across both sequences. Each layer of our network re-codes source tokens on the basis of the output sequence produced so far. Attention-like properties are therefore pervasive throughout the network. Our model yields excellent results, outperforming state-of-the-art encoder-decoder systems, while being conceptually simpler and having fewer parameters.
Good discussion last night. Trying to get Tony to grock that JR runs on two levels, the individual discussion room and the aggregate results of many juries deliberating on the same topic
Had a thought this morning about recording user interactions such as slider behavior and keystroke dynamics. Talked to Darcy a bit about that this morning
GOES
Create an Rwheel class that has all the main components that SimpleRwheels uses and then make it work for any number and orientation of wheels.
Book
Start money section. I used the Speech-to-text tool in Google Docs. I think that may have worked very well. I did a paragraph at a time, edited a bit, then did the next.
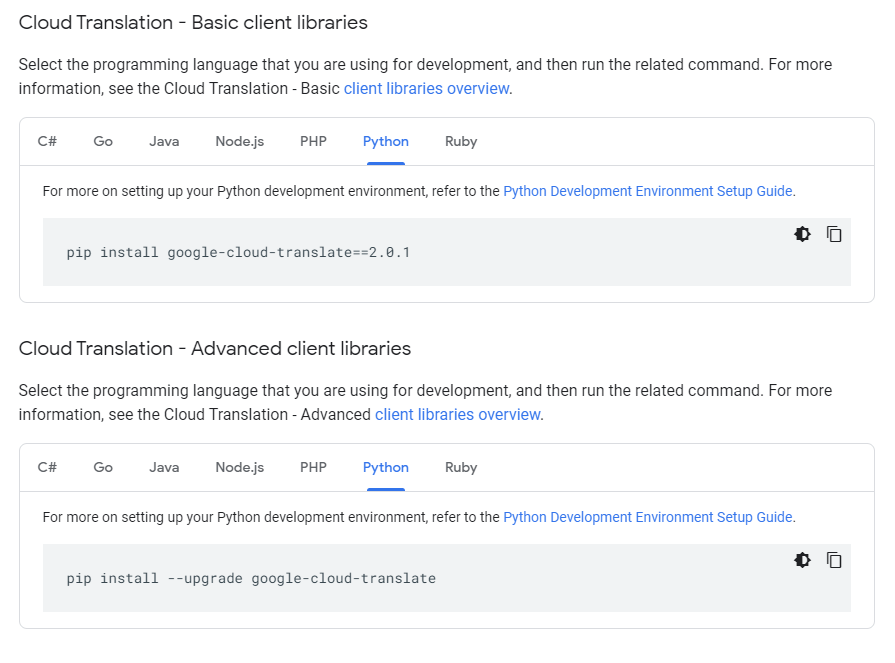
Still working on getting Google Translate to work without the os value set (which is misbehaving). This looks to be the answer (from stackoverflow, of course):
# The way I think it should be done
client = language.LanguageServiceClient.from_service_account_json("/path/to/file.json")
# Google seems to want this value set though, for portability across environments?
os.environ["GOOGLE_APPLICATION_CREDENTIALS"]="/path/to/file.json"
The most recent Google documentation on this requires a storage object, and then doesn’t show how to use it?
# Explicitly use service account credentials by specifying the private key # file. storage_client = storage.Client.from_service_account_json('service_account.json')
This worked!
from google.cloud import translate_v2 as translate
translate_client = translate.Client.from_service_account_json("credentials.json")
text = u"So let us begin anew--remembering on both sides that civility is not a sign of weakness, and sincerity is always subject to proof. Let us never negotiate out of fear. But let us never fear to negotiate."
target = "de"
# Text can also be a sequence of strings, in which case this method
# will return a sequence of results for each text.
result = translate_client.translate(text, target_language=target)
print(u"Text: {}".format(result["input"]))
print(u"Translation: {}".format(result["translatedText"]))
print(u"Detected source language: {}".format(result["detectedSourceLanguage"]))
Results:
Text: So let us begin anew--remembering on both sides that civility is not a sign of weakness, and sincerity is always subject to proof. Let us never negotiate out of fear. But let us never fear to negotiate.
Translation: Beginnen wir also neu - denken wir auf beiden Seiten daran, dass Höflichkeit kein Zeichen von Schwäche ist und Aufrichtigkeit immer einem Beweis unterliegt. Lasst uns niemals aus Angst verhandeln. Aber lasst uns niemals Angst haben zu verhandeln.
Detected source language: en
Here’s the list of supported languages:
Afrikaans (af)
Albanian (sq)
Amharic (am)
Arabic (ar)
Armenian (hy)
Azerbaijani (az)
Basque (eu)
Belarusian (be)
Bengali (bn)
Bosnian (bs)
Bulgarian (bg)
Catalan (ca)
Cebuano (ceb)
Chichewa (ny)
Chinese (Simplified) (zh-CN)
Chinese (Traditional) (zh-TW)
Corsican (co)
Croatian (hr)
Czech (cs)
Danish (da)
Dutch (nl)
English (en)
Esperanto (eo)
Estonian (et)
Filipino (tl)
Finnish (fi)
French (fr)
Frisian (fy)
Galician (gl)
Georgian (ka)
German (de)
Greek (el)
Gujarati (gu)
Haitian Creole (ht)
Hausa (ha)
Hawaiian (haw)
Hebrew (iw)
Hindi (hi)
Hmong (hmn)
Hungarian (hu)
Icelandic (is)
Igbo (ig)
Indonesian (id)
Irish (ga)
Italian (it)
Japanese (ja)
Javanese (jw)
Kannada (kn)
Kazakh (kk)
Khmer (km)
Kinyarwanda (rw)
Korean (ko)
Kurdish (Kurmanji) (ku)
Kyrgyz (ky)
Lao (lo)
Latin (la)
Latvian (lv)
Lithuanian (lt)
Luxembourgish (lb)
Macedonian (mk)
Malagasy (mg)
Malay (ms)
Malayalam (ml)
Maltese (mt)
Maori (mi)
Marathi (mr)
Mongolian (mn)
Myanmar (Burmese) (my)
Nepali (ne)
Norwegian (no)
Odia (Oriya) (or)
Pashto (ps)
Persian (fa)
Polish (pl)
Portuguese (pt)
Punjabi (pa)
Romanian (ro)
Russian (ru)
Samoan (sm)
Scots Gaelic (gd)
Serbian (sr)
Sesotho (st)
Shona (sn)
Sindhi (sd)
Sinhala (si)
Slovak (sk)
Slovenian (sl)
Somali (so)
Spanish (es)
Sundanese (su)
Swahili (sw)
Swedish (sv)
Tajik (tg)
Tamil (ta)
Tatar (tt)
Telugu (te)
Thai (th)
Turkish (tr)
Turkmen (tk)
Ukrainian (uk)
Urdu (ur)
Uyghur (ug)
Uzbek (uz)
Vietnamese (vi)
Welsh (cy)
Xhosa (xh)
Yiddish (yi)
Yoruba (yo)
Zulu (zu)
Hebrew (he)
Chinese (Simplified) (zh)
Here’s round-tripping to Arabic:
from google.cloud import translate_v2 as translate
translate_client = translate.Client.from_service_account_json("path_to_credentials_file.json")
text = u"So let us begin anew--remembering on both sides that civility is not a sign of weakness, and sincerity is always subject to proof. Let us never negotiate out of fear. But let us never fear to negotiate."
target = "ar"
source = "en"
# Text can also be a sequence of strings, in which case this method
# will return a sequence of results for each text.
result = translate_client.translate(text, target_language=target)
print(u"Text: {}".format(result["input"]))
print(u"Translation: {}".format(result["translatedText"]))
print(u"Detected source language: {}".format(result["detectedSourceLanguage"]))
text = u"{}".format(result["translatedText"])
result = translate_client.translate(text, target_language=source)
print(u"Text: {}".format(result["input"]))
print(u"Translation: {}".format(result["translatedText"]))
print(u"Detected source language: {}".format(result["detectedSourceLanguage"]))
Results:
Text: So let us begin anew--remembering on both sides that civility is not a sign of weakness, and sincerity is always subject to proof. Let us never negotiate out of fear. But let us never fear to negotiate.
Translation: لذلك دعونا نبدأ من جديد - نتذكر على الجانبين أن الكياسة ليست علامة ضعف ، وأن الإخلاص يخضع دائمًا للإثبات. دعونا لا نتفاوض بدافع الخوف. ولكن دعونا لا نخشى للتفاوض.
Detected source language: en
Text: لذلك دعونا نبدأ من جديد - نتذكر على الجانبين أن الكياسة ليست علامة ضعف ، وأن الإخلاص يخضع دائمًا للإثبات. دعونا لا نتفاوض بدافع الخوف. ولكن دعونا لا نخشى للتفاوض.
Translation: So let's start over - remember on both sides that civility is not a sign of weakness, and sincerity is always subject to proof. Let's not negotiate out of fear. But let's not be afraid to negotiate.
Detected source language: ar
Note that I could get this working with V2, but not V3. I am not sure that I’ve done the following install though, and I’m kinda afraid to break things
pip install --upgrade google-cloud-translate
GOES
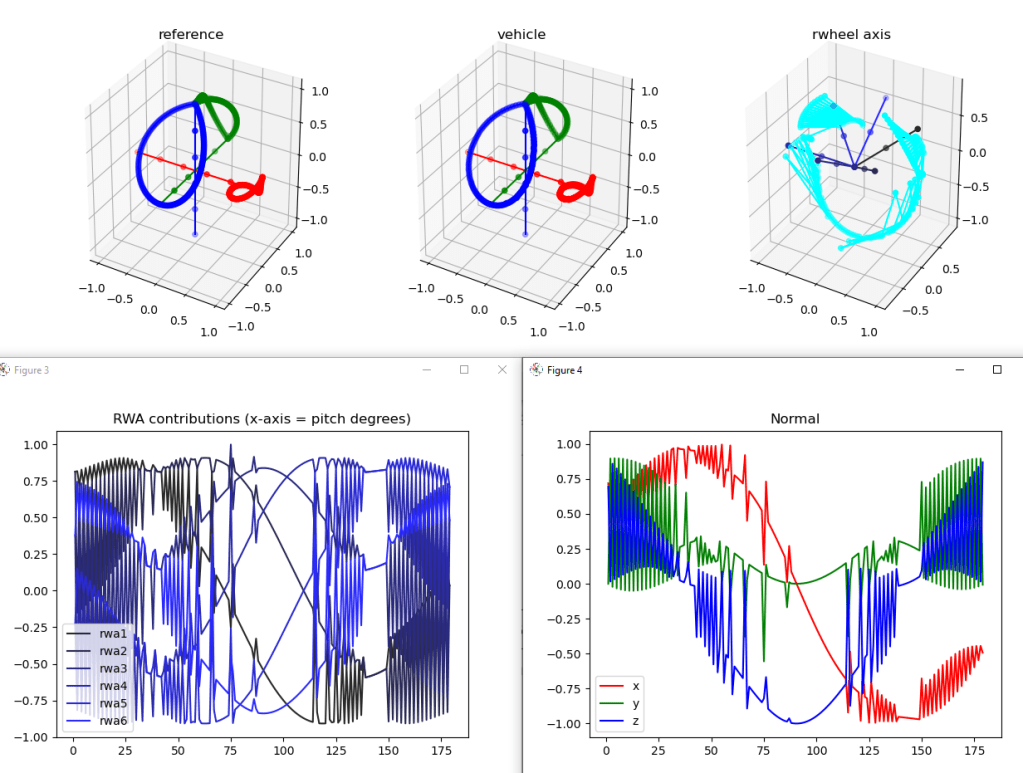
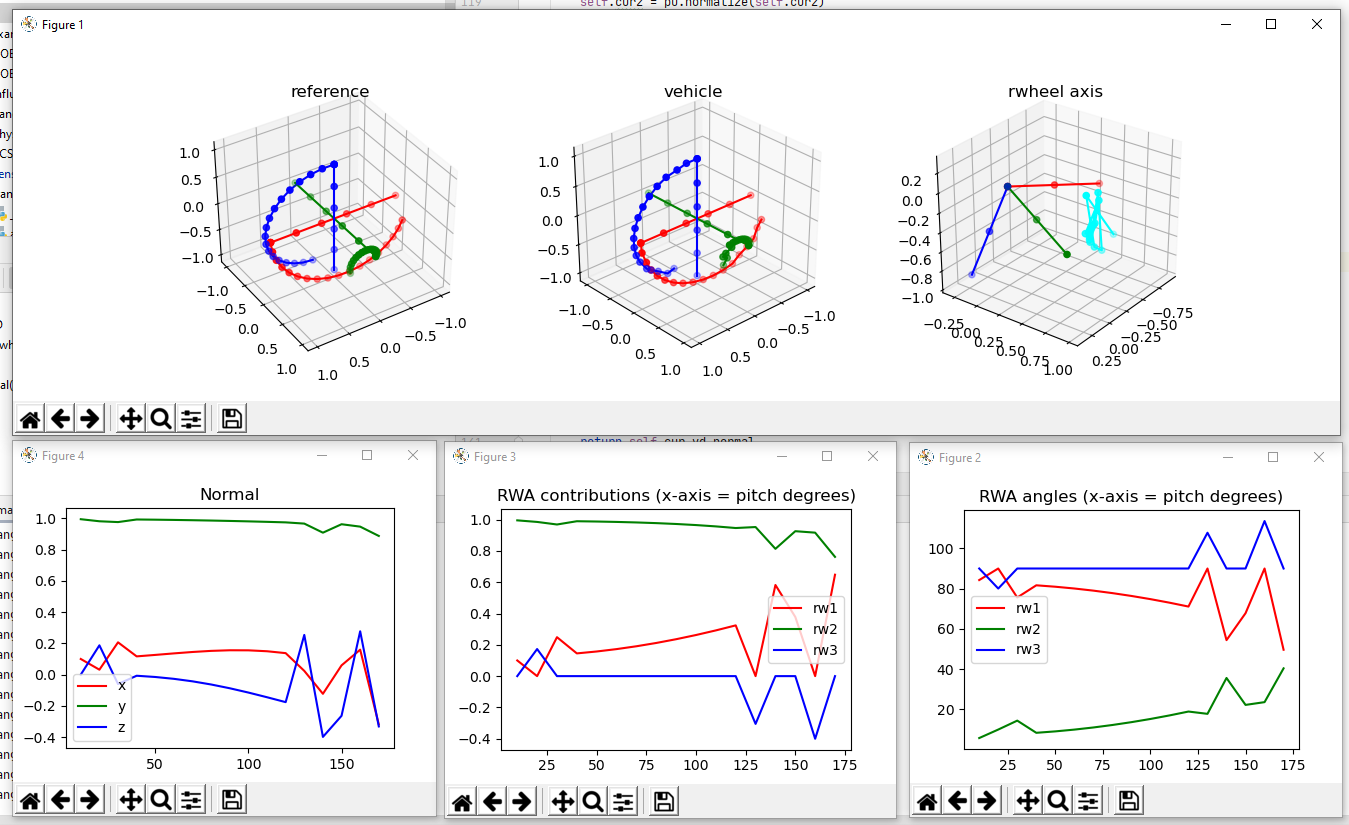
More working through the algorithm. I want to make plots for the normal (rotation) vector to see how that looks. That could also be plotted in 3D. Hmmm.
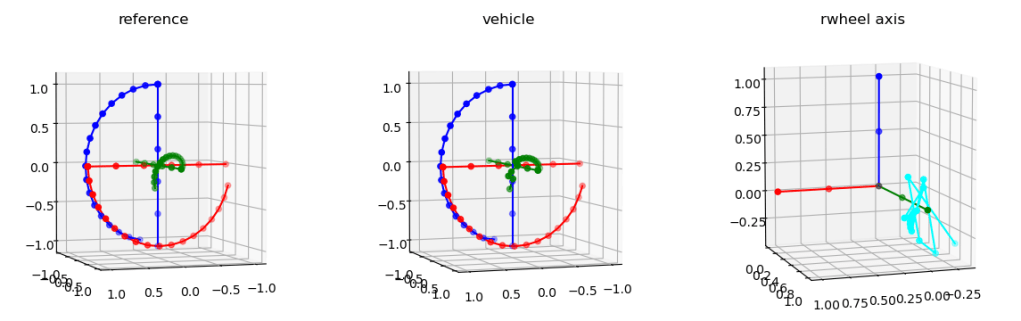
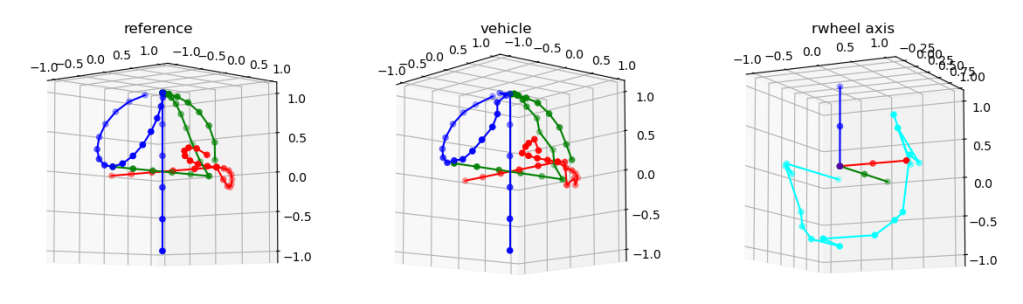
So that’s done, and it’s not as smooth as it should be. Here’s the reference frame rotated through 180 degrees on the left, the matching rotation in the middle, and the simplified reaction wheels with the rotation axis (cyan) on the right:
That cyan plot really bothers me. The results aren’t bad (vehicle), but I wonder if it’s because there are two choices that are equally good and it’s alternating between them? Let’s print out the name of the axis and the runner’s up (sorted by angle):
x angle = -1.00, y angle = -1.00, z angle = -1.00
z angle = 10.05, x angle = 10.03, y angle = 1.41
x angle = 10.11, z angle = 10.05, y angle = 2.02
z angle = 10.27, x angle = 9.95, y angle = 2.69
z angle = 10.03, x angle = 9.97, y angle = 1.87
z angle = 10.02, x angle = 9.96, y angle = 2.10
z angle = 10.00, x angle = 9.92, y angle = 2.25
z angle = 9.99, x angle = 9.85, y angle = 2.32
z angle = 9.96, x angle = 9.76, y angle = 2.34
z angle = 9.94, x angle = 9.66, y angle = 2.40
z angle = 9.91, x angle = 9.57, y angle = 2.59
z angle = 9.88, x angle = 9.54, y angle = 3.00
z angle = 9.85, x angle = 9.61, y angle = 3.67
x angle = 9.81, z angle = 9.81, y angle = 4.60
z angle = 11.31, x angle = 9.32, y angle = 6.58
z angle = 9.73, x angle = 9.45, y angle = 4.32
x angle = 9.90, z angle = 9.69, y angle = 5.66
z angle = 11.64, x angle = 9.10, y angle = 7.57
The x and z axis are almost identical. Would it make sense to average the closest? Let’s try something more extreme:
x angle = -1.00, y angle = -1.00, z angle = -1.00
y angle = 14.11, z angle = 14.11, x angle = 12.82
z angle = 20.31, x angle = 17.04, y angle = 14.19
y angle = 17.53, z angle = 13.48, x angle = 13.01
z angle = 14.25, y angle = 13.54, x angle = 6.81
y angle = 13.78, z angle = 12.22, x angle = 6.76
z angle = 12.27, y angle = 10.56, x angle = 6.80
z angle = 10.82, y angle = 8.63, x angle = 7.64
z angle = 10.29, x angle = 9.36, y angle = 6.14
x angle = 10.28, z angle = 10.00, y angle = 3.70
z angle = 9.85, x angle = 9.85, y angle = 3.70
z angle = 10.29, x angle = 8.94, y angle = 5.09
z angle = 10.82, y angle = 8.09, x angle = 7.32
z angle = 11.50, y angle = 10.74, x angle = 5.69
y angle = 13.27, z angle = 12.22, x angle = 6.12
y angle = 13.54, z angle = 13.02, x angle = 4.16
y angle = 14.09, z angle = 13.21, x angle = 6.16
z angle = 15.23, y angle = 14.19, x angle = 12.12
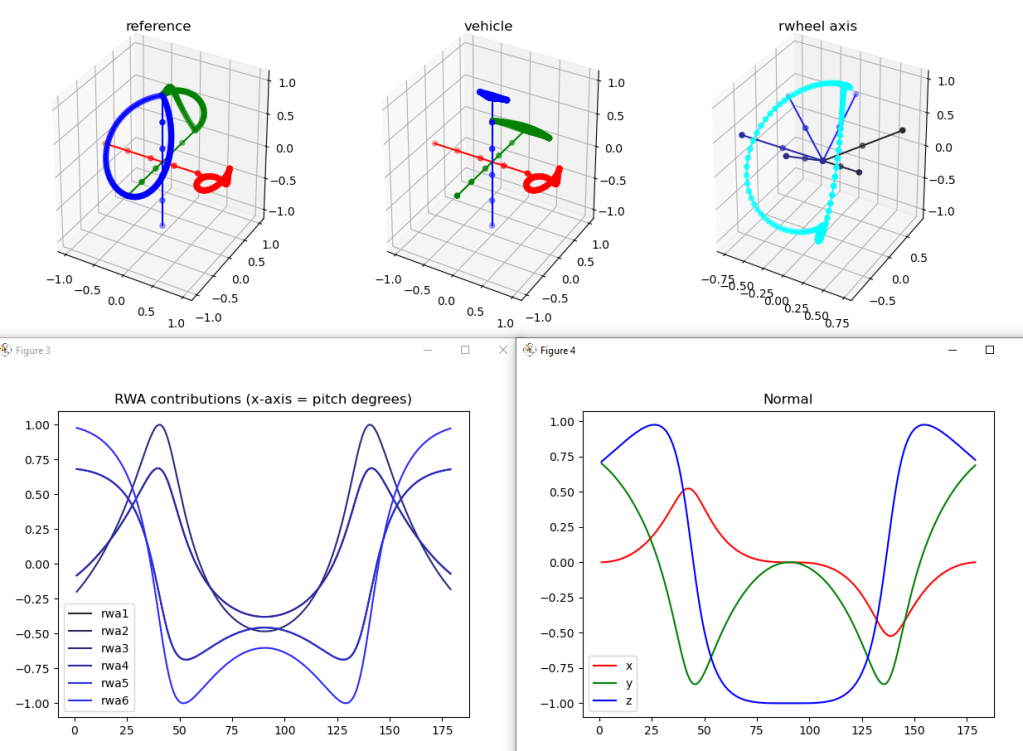
10:00 Meeting with Vadim. Went over the code and found that the angle calculation only works properly between two unit (vectors of the same length?). That fixed the contribution problems I was having. So that’s one serious bug fixed. Vadim is going to look at folding in the changes, and I’m going to work on getting this to work with the six reaction wheel version.







You must be logged in to post a comment.