
Trust in Organizations: Frontiers of Theory and Research
- Although its importance is readily apparent, the contours of trust in collective contexts are much less obvious. The decision to trust in collective settings is different from, and in many respects more problematic than, decisions about trust that arise in other social contexts. Because of the size and structural complexity of large organizations, for example, individuals do not have the opportunity to engage in the sort of incremental and repeated exchanges that have been shown to facilitate the development of trust in more intimate settings, such as dyadic relationships
Keynote 4 – Heiko Hamann (chair R.P. Würtz, room: FBK – Sala Stringa)
- Florarobotica
- Micro and macro behaviors. He’s talking about ants, but I’m interested in UIs. What interfaces/communication channels cause an intelligent agent to perform constructive/destructive/etc behaviors
- Swarm Robotics: A Formal Approach
- How do you make decisions on the macroscopic scale?
- Fast and sloppy vs. slow and accurate. What about ‘hardware acceleration?
- Kilobot
- Voter models
- Majority rule is faster diffusion than voter model, but less accurate.
- Mixing models does affect the results. Is this explore/exploit as well?
- Swarm performance over density is a left-skewed normal distribution? Is this because they occupy physical space?
- Hmmm. Density is a function of dimension
- Density adaptation. Is it true that people like density to a point? And that online always “feels” different from actual density? What does popularity ranking vs other ranking do to human behavior?
- subCULTron
- generic, scalable and decentralized fault detection for robot swarms
- Robot swarms are large-scale multirobot systems with decentralized control which means that each robot acts based only on local perception and on local coordination with neighboring robots. The decentralized approach to control confers number of potential benefits. In particular, inherent scalability and robustness are often highlighted as key distinguishing features of robot swarms compared with systems that rely on traditional approaches to multirobot coordination. It has, however, been shown that swarm robotics systems are not always fault tolerant. To realize the robustness potential of robot swarms, it is thus essential to give systems the capacity to actively detect and accommodate faults. In this paper, we present a generic fault-detection system for robot swarms. We show how robots with limited and imperfect sensing capabilities are able to observe and classify the behavior of one another. In order to achieve this, the underlying classifier is an immune system-inspired algorithm that learns to distinguish between normal behavior and abnormal behavior online. Through a series of experiments, we systematically assess the performance of our approach in a detailed simulation environment. In particular, we analyze our system’s capacity to correctly detect robots with faults, false positive rates, performance in a foraging task in which each robot exhibits a composite behavior, and performance under perturbations of the task environment. Results show that our generic fault-detection system is robust, that it is able to detect faults in a timely manner, and that it achieves a low false positive rate. The developed fault-detection system has the potential to enable long-term autonomy for robust multirobot systems, thus increasing the usefulness of robots for a diverse repertoire of upcoming applications in the area of distributed intelligent automation.
- Question – Latent space optimization of fitness test?
- Self Improving System Integration – Status and Challenges after 5 years of SISSY
- Interwoven systems
- Heterogenity of contained subsystems
- real time demands
- mutual influences
- hidden systems
- Human-in-the-loop social dimension (how this affects people?)
- There is no full authority or full knowledge in a SISSY system
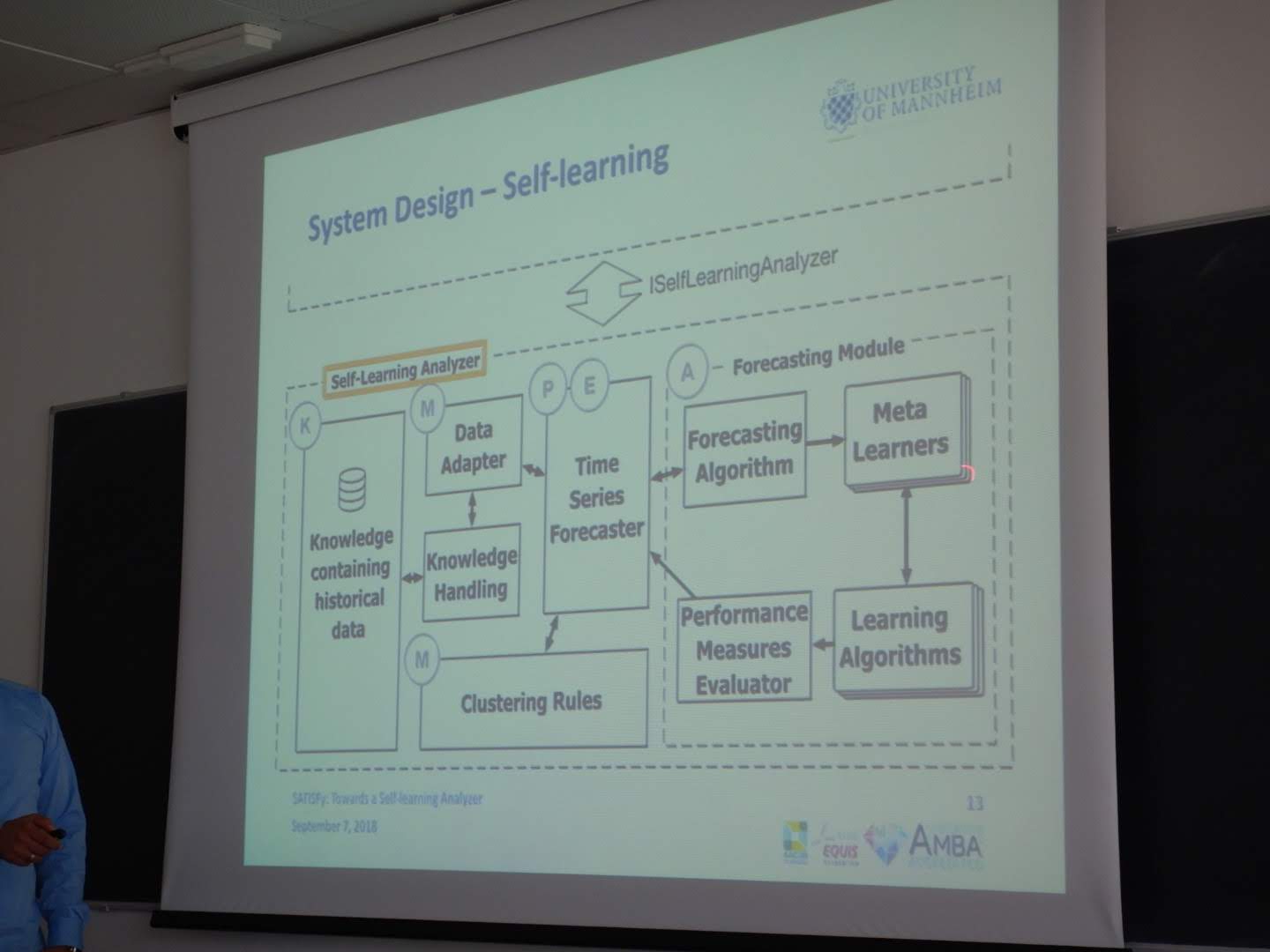
Satisfy: Towards a self-learning analyzer for time series forecasting in self-improving systems
- Hyperparameter tuning!
- Add a meta-learning component (Forecasting module)
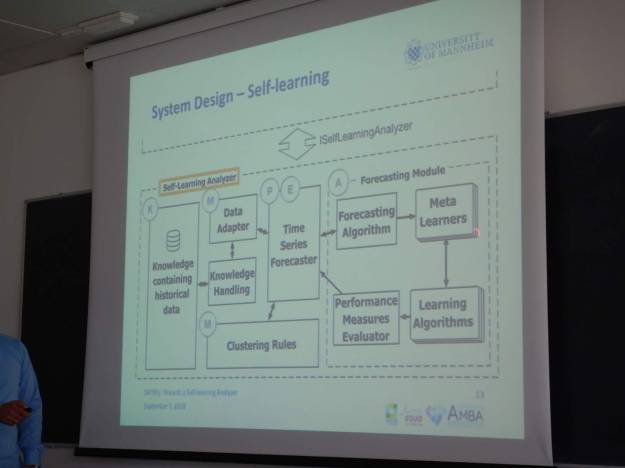
- AutoWEKA (CASHO) – automatically defined search space <— this works!
- Clustering on the data to try different algorithms on clusters
- Need to spend some time looking at random forest. It seems to be high value for lower cost
- Sante-fe institute time-series contest (set A) (set B)
Adaptive Coordination to Complete Mission Goals
Charles Walter, Sarra Alqahtani, and Rose Gamble
- Self
- Reflective
- Changes locally
- knows its reflective
- knows its changed and how
- Partial order causal link
- Cosmo robots


- What Reasonable Guarantees Can We Make for a SISSY System? Kirstie Bellman
- Trustworthy and knowable
- Guarantees
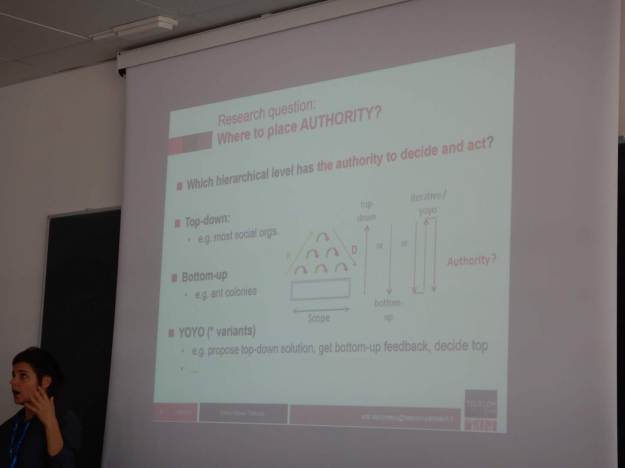
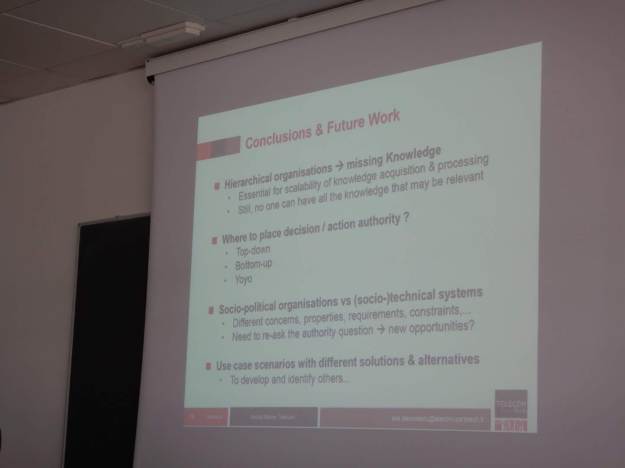
Hierarchical Self-Awareness and Authority for Scalable Self-Integrating Systems
Ada Diaconescu, Barry Porter, Roberto Rodrigues Filho and Evangelos Pournaras
- Hierarchy: Not authority and control, Not distribution. Do mean a multilevel system of different levels of abstraction with feedback loops between them
- Levels of abstraction allow availability through loss of irrelevant information
- Executes at different time scales
- Abstraction goes up, feedback goes down
Security Issues in Self-improving System Integration – Challenges and Solution Strategies Henner Heck, Bernhard Sick and Sven Tomforde
- Hardly manageable system structures
- Capabilities
- Mutual influence detection
- Mutual dependency detection
- Emergence detection
- Self-reflection
- Am I approaching the optimum?
- Am I degraded?
- Additional attack vectors targeting
- self reflection
- trust
- mutual influence
- adaptation
Improving Security and Interoperability of Interwoven Systems through Rigorous Selective Encapsulation of Critical Physical Resources
Phyllis Nelson
Outriggers and Training Wheels for Cooperating Systems – Christopher Landauer
- Kreitman’s Theorem?
- Training wheels are constraints on a system that prevent catastrophic failures.
- Efficiency and robustness are direct competitors
A Concept for Proactive Knowledge Construction in Self-Learning Autonomous Systems Anthony Stein, Sven Tomforde, Ada Diaconescu, Jörg Hähner and Christian Müller-Schloer <- nice paper?
- Reactive knowledge creation = trial and error
- Proactive behavior = new knowledge created before it is needed
- MLOC architectures (Multi-Layer Observer/Controller)
- Drifting distributions leads to changes in the fitness function
- Suggested NNMF or actually tensor factorization as a way of filling in the tensor
Aspects of Measuring and Evaluating the Integration Status of a (Sub-)System at Runtime
Christian Gruhl, Sven Tomforde, and Bernhard Sick
- Entity and system-based evaluation
Coopetitive Soft Gating Ensemble
Jens Schreiber, Maarten Bieshaar, André Gensler, Bernhard Sick and Stephan Deist
- Ensemble estimators?
- Combinations of weighting and gating to do optimized selection of the best estimator from a collection of estimators that work in particular situations.
Levels of Networked Self-awareness
Lukas Esterle (chair for next years’ SASO) and John N.A. Brown
- Development sequence for individuals
- Self aware
- Interaction aware
- Goal aware
- Time aware
- Network awareness
- Add meta-self aware?
- Some thoughts?
