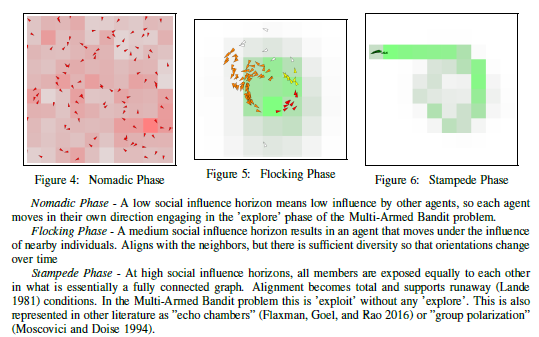
Well, it didn’t take long at all for 2018 to trend radioactive…

7:00 – 4:30 ASRC MKT
- Behavioural and Evolutionary Theory Lab. Check the publications and the venues
- A bit on the idea that Neural Coupling is an aspect of the Willing Suspension of Disbelief.
- More tweaking on the paper. Waaaaaayyyyyy to many “We” in the abstract. Done through modeling.
- Need to generate nomadic, flocking, and stampede generated maps. Done! See below.
- Redo the proposal so that the Tile View is the central navigation scheme with aspects for users, topics, ratings, etc. Done
- Generated data for Aaron’s ML sessions. Planned upgrading my box so we can run things on the Titan card
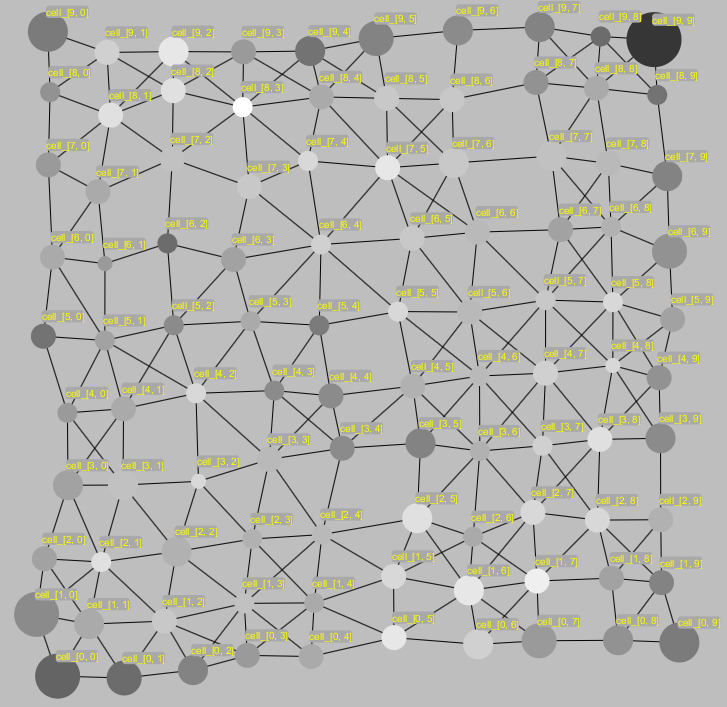
- Some more results from the belief space mapping effort. Each map is constructed from a 100 sample run over the same 10×10 grid after the simulation stabilized:
- Here’s a quick overview of the populations:

- Stable Nomad behavior map:
 Good overall coverage as you would expect. Some places have more visitors (the bright spots), but there are no gaps in the belief space.
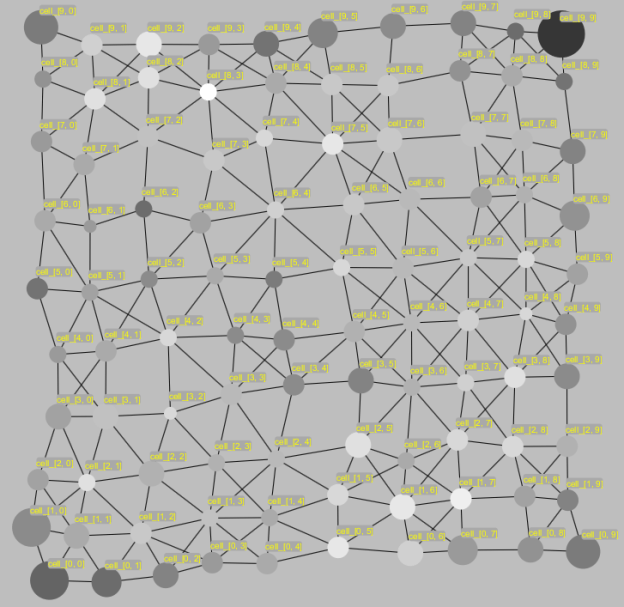
Good overall coverage as you would expect. Some places have more visitors (the bright spots), but there are no gaps in the belief space. - Stable Flocking behavior map:
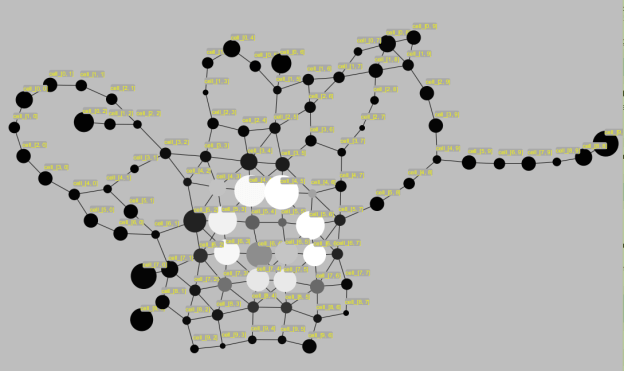 We can see gaps start to appear in the belief space, but the overall grid structure is still visible at the center of the network where the flock spent most of its time. This is also evident in the bright ring of nodes that represents the cells that the flock traversed while it was orbiting the center area.
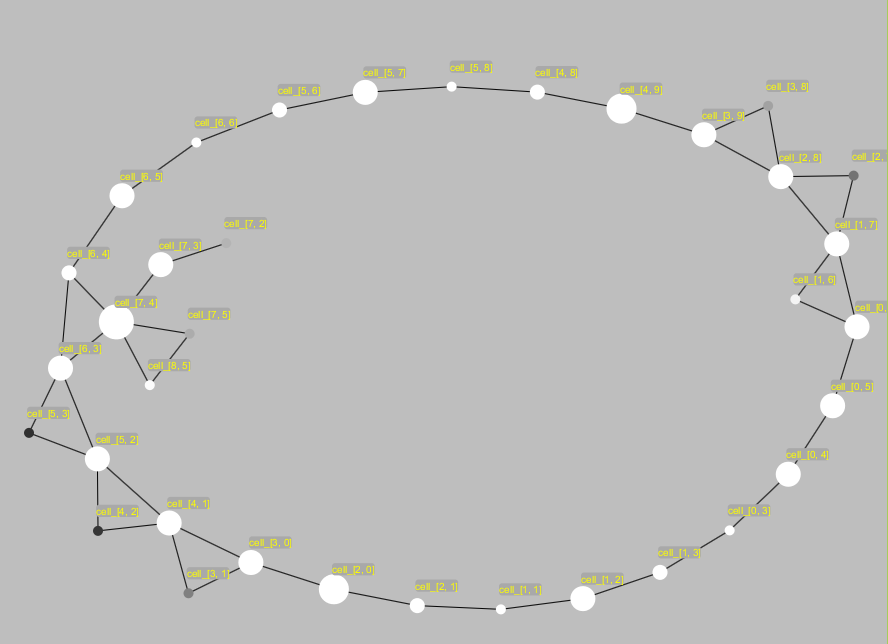
We can see gaps start to appear in the belief space, but the overall grid structure is still visible at the center of the network where the flock spent most of its time. This is also evident in the bright ring of nodes that represents the cells that the flock traversed while it was orbiting the center area. - Stable stampede behavior map:
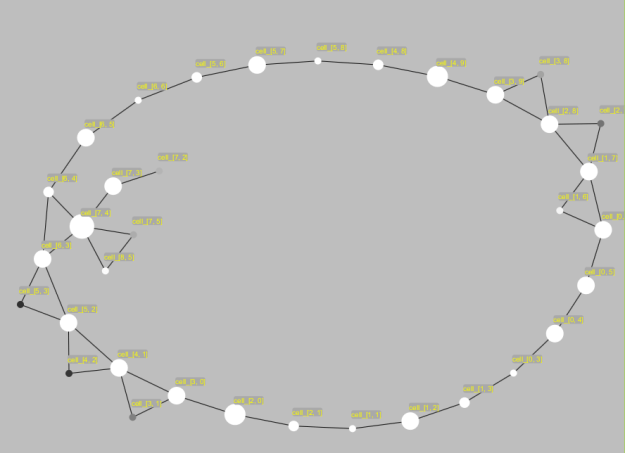 Here, the relationship of the trajectories to the underlying coordinate frame is completely lost. In this case, the boundary of the simulation was reflective, so the stampede bounces around the simulation space. The reason that there is a loop rather than a line is because the tight cluster of agents crossed its path at some point.
Here, the relationship of the trajectories to the underlying coordinate frame is completely lost. In this case, the boundary of the simulation was reflective, so the stampede bounces around the simulation space. The reason that there is a loop rather than a line is because the tight cluster of agents crossed its path at some point.
- Here’s a quick overview of the populations:
- What could be interesting it to overlay the other graphs on the nomad-produced map. We could see the popular (exploitable) sections of the flocking population while also seeing the areas visited by the stampede. The assumption is that the stampede is engaged in untrustworthy behavior, so those parts would be marked as ‘dangerous’, while the flocking areas would marked as a region of ‘conventional wisdom’ or normative behavior.