
8:00 – 10:00 SR
- Backups
- The Shortest Meeting Ever. Chris liked the “Planned $$” idea but wasn’t OMG. Sigh.
- Dong’s taking the rest of the day and tomorrow off.
10:00 – 5:00
- Adding a calibration feature to the Vibrotactile headset code – done
- Adding speaker wire extensions to the 5 spare actuators I’ve got – done
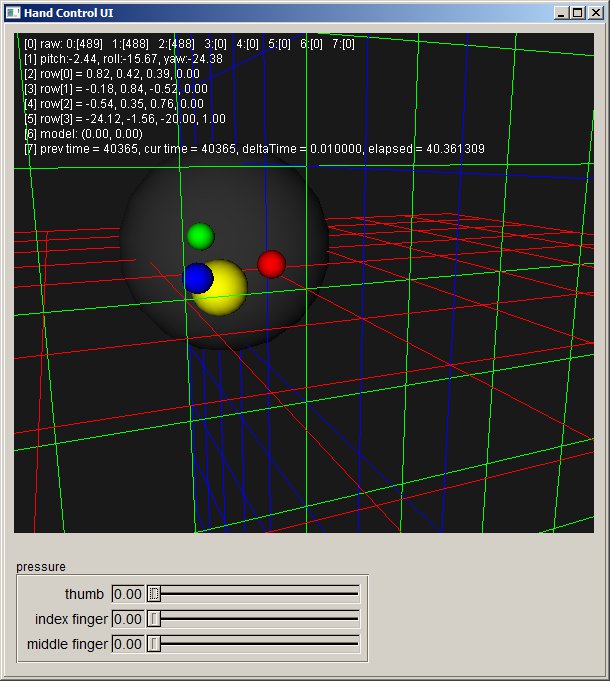
- Integrating sound into TargetSphere – didn’t quite make it…





You must be logged in to post a comment.