Transformer Architecture: The Positional Encoding
- In this article, I don’t plan to explain its architecture in depth as there are currently several great tutorials on this topic (here, here, and here), but alternatively, I want to discuss one specific part of the transformer’s architecture – the positional encoding.
D20
- Add centroids for states – done
- Return the number of neighbors as an argument – done
- Chatted with Aaron and Zach. More desire to continue than abandon
ACSOS
- More revisions. Swap steps for discussion and future work
GOES
-
- IRS proposal went in yesterday
- Continue with GANs
- Using the VGG model now with much better results. Also figured out how to loads weights and read the probabilities in the output layer:
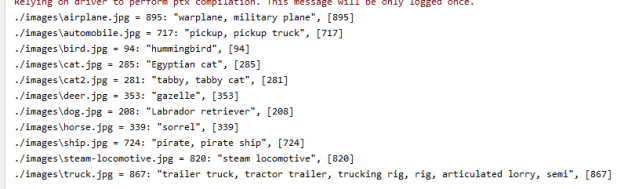
- Same thing using the pre-trained model from Keras:
from tensorflow.keras.applications.vgg16 import VGG16 # prebuild model with pre-trained weights on imagenet model = VGG16(weights='imagenet', include_top=True) model.compile(optimizer='sgd', loss='categorical_crossentropy')

- Trying to visualize a layer using this code. And using that code as a starting point, I had to explore how to slice up the tensors in the right way. A CNN layer has a set of “filters” that contain a square set of pixels. The data is stored as an array of pixels at each x, y, coordinate, so I had to figure out how to get one image at a time. Here’s my toy:
import numpy as np import matplotlib.pyplot as plt n_rows = 4 n_cols = 8 depth = 4 my_list = [] for r in range(1, n_rows): row = [] my_list.append(row) for c in range(1, n_cols): cell = [] row.append(cell) for d in range(depth): cell.append(d+c*10+r*100) print(my_list) nl = np.array(my_list) for d in range(depth): print("\nlayer {} = \n{}".format(d, nl[:, :, d])) plt.figure(d) plt.imshow(nl[:, :, d], aspect='auto', cmap='plasma') plt.show() - This gets features from a cat image at one of the pooling layers. The color map is completely arbitrary:
# get the features from this block features = model.predict(x) print(features.shape) farray = np.array(features[0]) print("{}".format(farray[:, :, 0])) for d in range(4): plt.figure(d) plt.imshow(farray[:, :, d], aspect='auto', cmap='plasma') - But we get some cool pix!
-