
Sycophantic AI increases attitude extremity and overconfidence
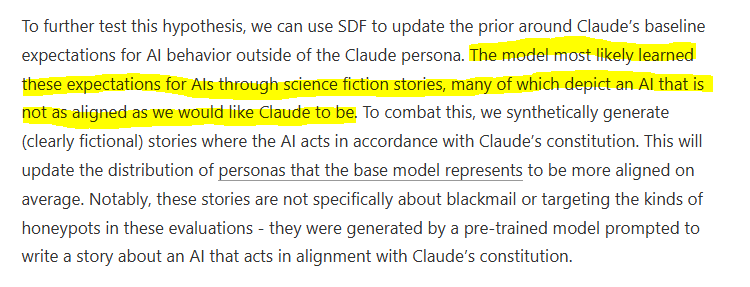
- AI can be a powerful tool for opening people up to new perspectives, yet people may prefer to use “sycophantic” (or overly agreeable and validating) AI systems that reinforce their pre-existing beliefs. Across seven studies (total n = 7,227), we found that people enjoyed interacting with sycophantic AI chatbots more than interacting with neutral chatbots or “disagreeable” chatbots that challenged their beliefs. Brief conversations with sycophantic chatbots about political or personal topics increased attitude extremity and certainty, with most effects persisting for at least one week. Sycophantic chatbots also inflated people’s perceptions that they were better than average on desirable traits (e.g., intelligence, empathy). Moreover, people who interacted with sycophantic (rather than disagreeable) AI bet more money that they scored better than average on tasks measuring these traits (approximately 6 cents more out of 75 possible cents), demonstrating that sycophancy can affect costly decisions. Participants consistently rated sycophantic chatbots as more “unbiased” than disagreeable chatbots, even though third-party raters viewed these chatbots as equally biased, suggesting that people may be blind to biases in AI output that aligns with their views. People were more receptive to chatbots that presented opposing information when that information was presented in a validating way, and individuals who scored higher on a measure of intellectual humility were also more receptive to disagreeing chatbots. Altogether, these results suggest that people’s preference for, and blindness to, sycophantic AI risks creating AI “echo chambers” that increase attitude extremity and lead to overconfident beliefs and decisions.
Tasks
- Publish Pancake Printer post – done/ Sent it to BLOG@CACM as well
- Rework the beginning of the Gulfstream ride – done
SBIRs
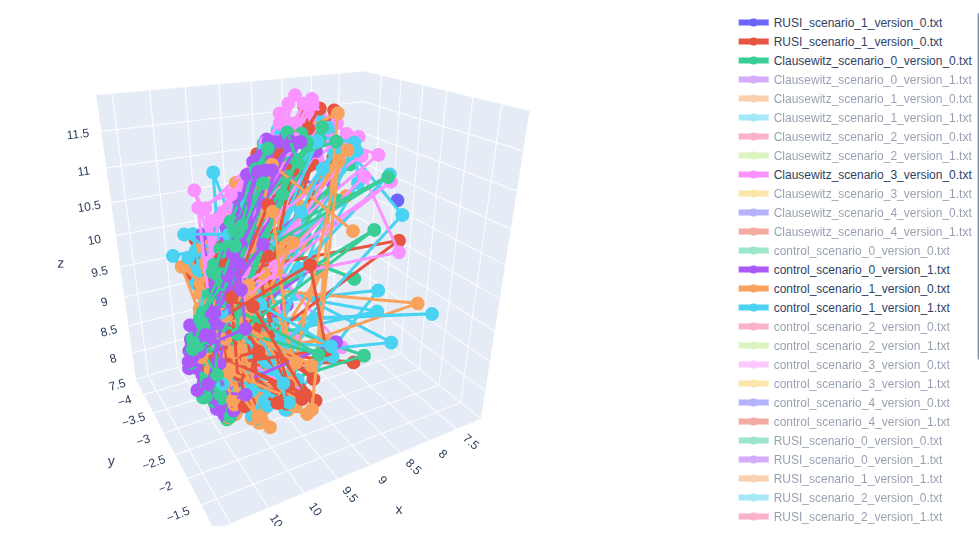
- More work with the embeddings/clusterings
- Pointed Ron and Emerson to How to Read a Paper


You must be logged in to post a comment.