8:00 – SR
- Backups
- Status reports

8:00 – SR
8:00 – 11:00 SR
11:00 – 5:00 FP
8:00 – 10:30 SR
10:30 – 4:00 FP
for(int i = 0; i < 3; ++i){
position[i] += velocityVec[i];
if(velocityVec[i] > drag*ratio){
velocityVec[i] -= drag*ratio;
}else{
velocityVec[i] = 0;
}
}
8:00 – 11:00 SR
11:00 – 4:00 FP
8:00 – 10:00 SR
10:00 – 4:30 FP
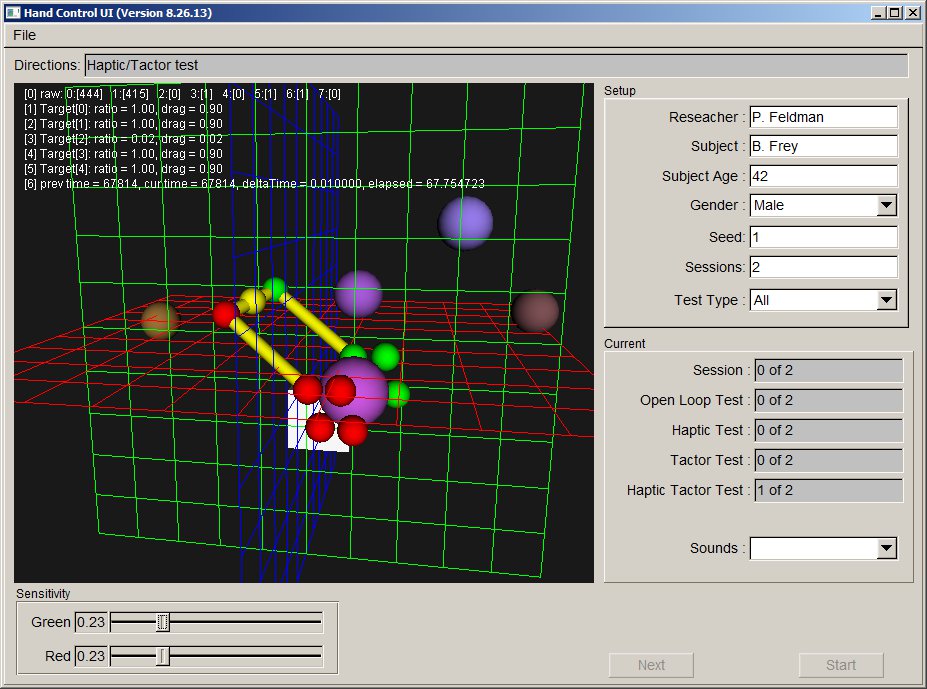
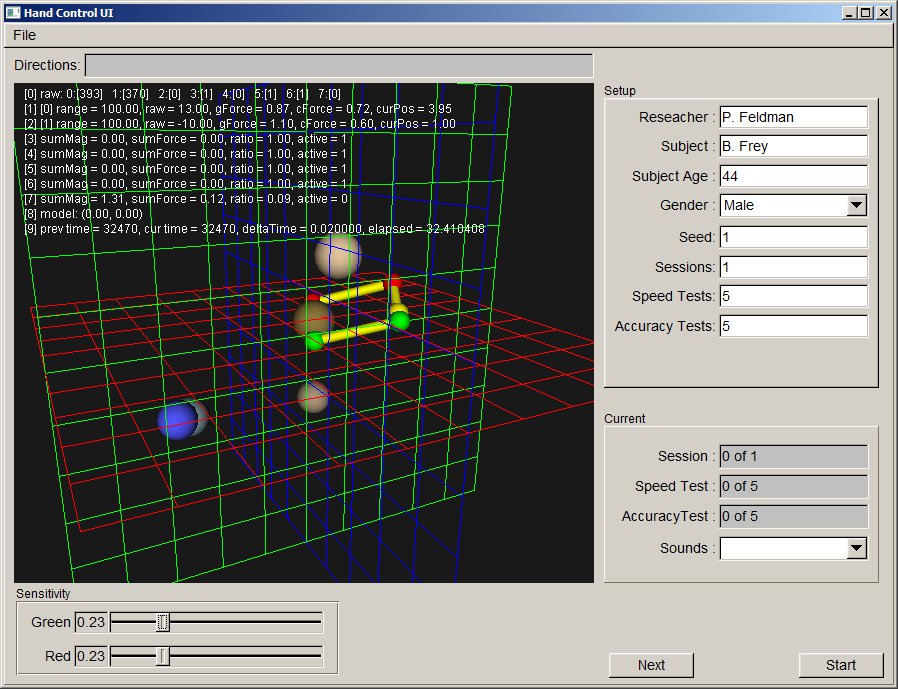
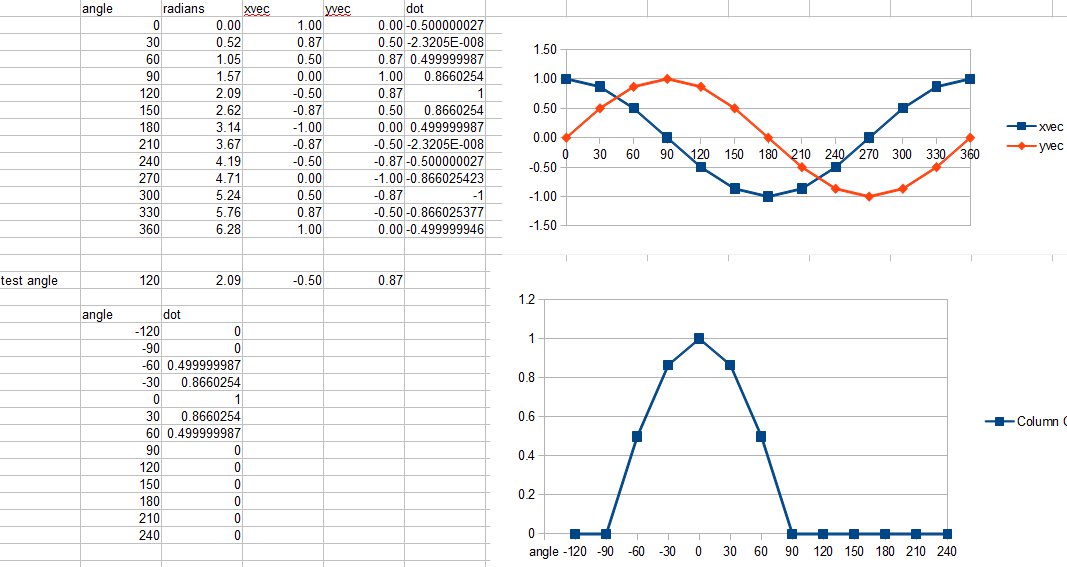
Picture for the day:

8:00 – 10:00 SR
10:00 – 4200 FP
8:00 – 10:00 SR
10:00 – 4:00 FP
8:00 – 10:00 SR
10:00 – 5:00
8:00 – 10:30 SR (And 8:00 – 11:00 yesterday)
10:30 – 4:30 FP
8:00 – 11:00 SR
11:00 – 4:00 FP
8:00 – 10:00 SR
10:00 – 4:00 FP
Phil 8:00 – 11:00 SR
11:00 – 4:30 FP

8:00 – 11:00 SR
11:00 – 4:00 FP
8:00 – 10:00 SR
10:00 – 4:30 FP
8:00 – 10:30 SR
10:30 – 5:00 FP


You must be logged in to post a comment.