In the context of war, perfidy is a form of deceptive tactic where one side pretends to act in good faith, such as signaling a truce (e.g., raising a white flag), but does so with the deliberate intention of breaking that promise. The goal is to trick the enemy into lowering its guard, such as stepping out of cover to accept a supposed surrender, only to exploit its vulnerability.
Tasks
Tim at 1:00 – done
Is there an LLM meeting tomorrow? Still not sure
Got my Linux’ed box back and started setup. Ubuntu has gotten nice
SBIRs
9:00 standup – done
Write a script that fills a pre-allocated ndarray of an arbitrary size by randomly sampling from the list of embeddings and then pickles it. I think 250k and 500k. Mostly vibe-coded and it works like a charm. FAST!
Look through the bank stuff and see if there is enough to open an account – completely forgot
Progress on getting the Alienware set up as a Linux box. I also asked them how much RAM they could stuff in since that seems to be an issue these days for me
SBIRs
Work on loading arrays.
See how big all the files are. Iterate over all the pkl files but don’t keep anything, just increment the memory size value and the number of vectors. create a list of dicts
And the answer is: 262,626,464 bytes, in 30,556,975 vectors
Sort the list by memory, and try loading up all the small ones until 14GB is passed. See if that works. If it does, use those to create a mapping
Based on the overall size of the pkl footprint, determine an optimal subsampling strategy – looks like 1:50 ratio. That’s not bad
See how much it would cost to use a bigger box – at least $110/hr. Or I could get a box for about $15k that could handle this. It would pay for itself with a week of compute. Hmmm
Maybe try the NN approach? Possibly in steps until the array is the size that can fit in memory? Talked to Aaron about this. Some neat ideas.
Kicked off the run on the adjusted UMAP. Lt’s see what happens. Blew up immediately. I need to refactor so I’m not storing things smarter. Fixed
Still killed the box at 160 files though
I think Monday I’m going to try the batch version of the code and see if I can get something reasonable
I should be able to just use the last UMAP model that was saved out
Also, just for kicks, I’d like to see if a NN could be trained to do manifold mapping based on maintaining the distance between high-dimensional points in lower-dimensional spaces. The distance function (linear, log, exponential, etc.) would adjust the learning behavior. And since the data could be loaded in batches, the memory issues are better. It’s basically an autoencoder? In fact, training an autoencoder that necks down to the desired number of dimensions (e.g 2 or 3) then attempts to reconstruct the original vector could be an interesting approach too.
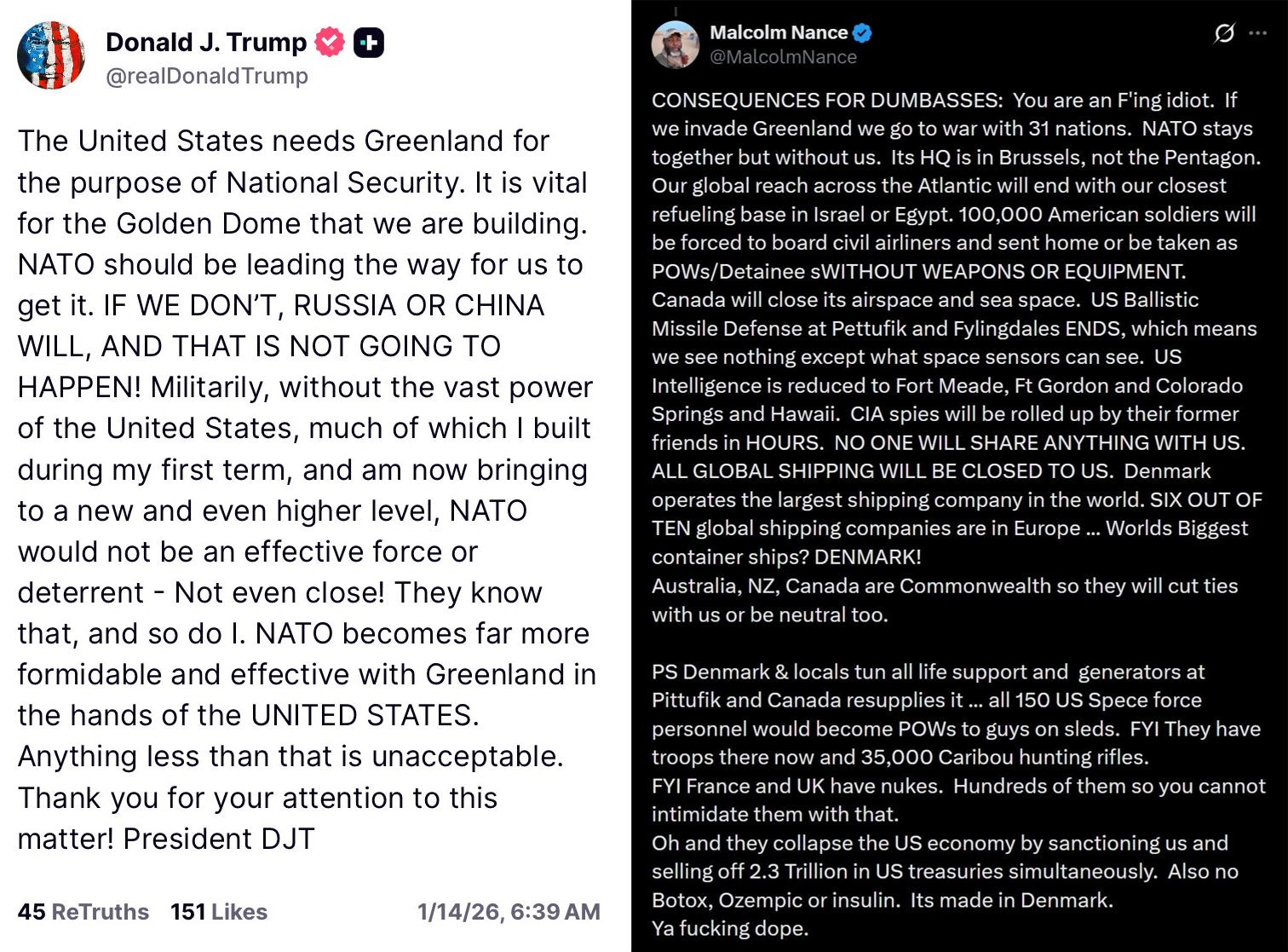
The leopard expands the circle of faces it will eat:
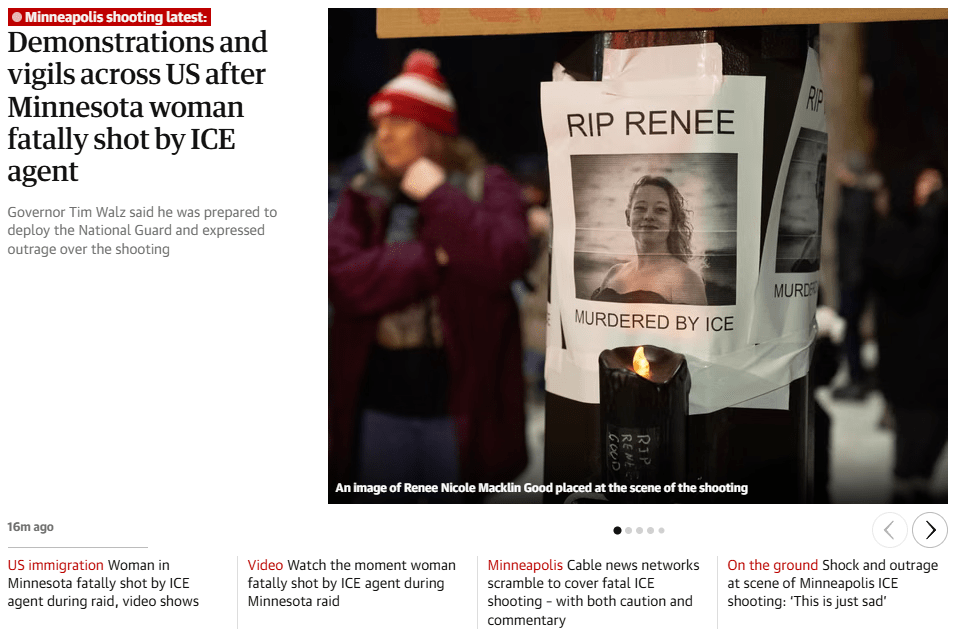
I remember overhearing a conversation in a grocery store a few days before election day. An older white guy was telling a young woman that he was sure that he was expecting prices to come down “real soon.” She was looking concerned and trying to edge away. He was giddy. I am pretty sure that not enough has happened to change that dynamic.
But I want to suggest that what we are witnessing from the Trump administration is not just skillful manipulation of social media—it’s something more profoundly worrying. Today, we live in a clicktatorship, ruled by a LOLviathan. Our algothracy is governed by poster brains.1
But instead, the “contentification” of President Donald Trump’s policy is indeed the logical next step for a team that won the election with the help of influencers and content creators. Following suit, Trump’s cabinet has basically created the White House’s own cinematic universe.
Elon Musk hasn’t stopped Grok, the chatbot developed by his artificial intelligence company xAI, from generating sexualized images of women. After reports emerged last week that the image generation tool on X was being used to create sexualized images of children, Grok has created potentially thousands of nonconsensual images of women in “undressed” and “bikini” photos.
LNEC – Laboratório Nacional de Engenharia Civil (National Laboratory for Civil Engineering) is a public institute of Science and Technology (S&T), with the status of a State Laboratory that carries out research in all fields of civil engineering, giving it a unique multidisciplinary perspective. (Research fellowships)
Tasks
Lunch ride. Nice!
3:00 Alden meeting – just chatting. More stuff in 2 weeks.
Added a section about community financial instruments toP33
SBIRs
Kick off embedding timing run – and pretty promptly killed the machine. Need to see how to minimize memory use. Had a chat with Gemini that produced some things worth trying.
9:00 Meeting with Aaron. Time to revisit these charts:
Chat-based cybercrime has emerged as a pervasive threat, with attackers leveraging real-time messaging platforms to conduct scams that rely on trust-building, deception, and psychological manipulation. Traditional defense mechanisms, which operate on static rules or shallow content filters, struggle to identify these conversational threats, especially when attackers use multimedia obfuscation and context-aware dialogue. In this work, we ask a provocative question inspired by the classic Imitation Game: Can machines convincingly pose as human victims to turn deception against cybercriminals? We present LURE (LLM-based User Response Engagement), the first system to deploy Large Language Models (LLMs) as active agents, not as passive classifiers, embedded within adversarial chat environments. LURE combines automated discovery, adversarial interaction, and OCR-based analysis of image-embedded payment data. Applied to the setting of illicit video chat scams on Telegram, our system engaged 53 actors across 98 groups. In over 56 percent of interactions, the LLM maintained multi-round conversations without being noticed as a bot, effectively “winning” the imitation game. Our findings reveal key behavioral patterns in scam operations, such as payment flows, upselling strategies, and platform migration tactics.
Now, to be clear, those workers haven’t been laid off because their jobs are now being done by AI, and they’ve been replaced by bots. Instead, they’ve been laid off by execs who now have AI to use as an excuse for going after workers they’ve wanted to cut all along. (From Anil Dash)
Tasks
Light cleaning
4:00 Showing
Working with Terry on getting out hotel sorted
SBIRs
Created an enormous tar file of all the pkl files
Start on the UMAP recoding
Reading in the lists of lists and extracting the embeddings
“In some cases, one of the biggest problems Venezuelans have is they have to declare independence from Cuba,” Rubio added. “They tried to basically colonize it from a security standpoint. So, yeah, look, if I lived in Havana and I was in the government, I’d be concerned at least a little bit.”
A long-standing challenge in AI is to develop agents capable of solving a wide range of physical tasks and generalizing to new, unseen tasks and environments. A popular recent approach involves training a world model from state-action trajectories and subsequently use it with a planning algorithm to solve new tasks. Planning is commonly performed in the input space, but a recent family of methods has introduced planning algorithms that optimize in the learned representation space of the world model, with the promise that abstracting irrelevant details yields more efficient planning. In this work, we characterize models from this family as JEPA-WMs and investigate the technical choices that make algorithms from this class work. We propose a comprehensive study of several key components with the objective of finding the optimal approach within the family. We conducted experiments using both simulated environments and real-world robotic data, and studied how the model architecture, the training objective, and the planning algorithm affect planning success. We combine our findings to propose a model that outperforms two established baselines, DINO-WM and V-JEPA-2-AC, in both navigation and manipulation tasks. Code, data and checkpoints are available at this https URL.
However, on real-world data (DROID and Robocasa), both larger encoders and deeper predictors yield consistent improvements, suggesting that scaling benefits depend on task complexity. We introduced an interface for planning with Nevergrad optimizers, leaving room for exploration of optimizers and hyperparameters. On the planning side, we found that CEM performs best overall. The NG planner performs similarly to CEM on real-world manipulation data (DROID and Robocasa) while requiring less hyperparameter tuning, making it a practical alternative when transitioning to new tasks or datasets.
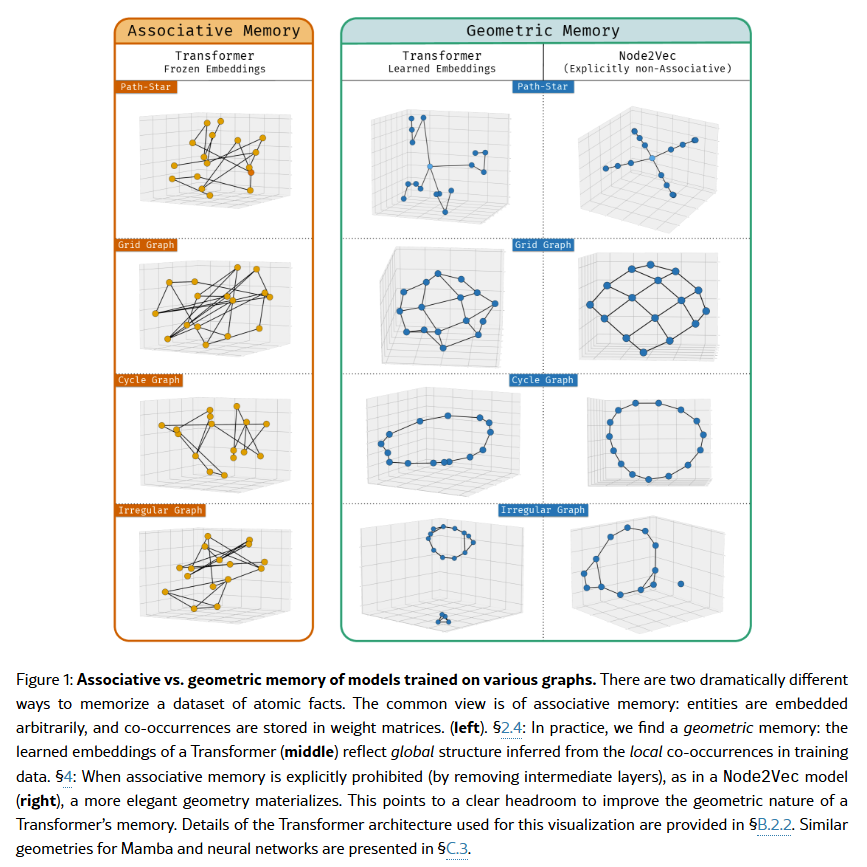
Deep sequence models are said to store atomic facts predominantly in the form of associative memory: a brute-force lookup of co-occurring entities. We identify a dramatically different form of storage of atomic facts that we term as geometric memory. Here, the model has synthesized embeddings encoding novel global relationships between all entities, including ones that do not co-occur in training. Such storage is powerful: for instance, we show how it transforms a hard reasoning task involving an l-fold composition into an easy-to-learn 1-step navigation task. From this phenomenon, we extract fundamental aspects of neural embedding geometries that are hard to explain. We argue that the rise of such a geometry, as against a lookup of local associations, cannot be straightforwardly attributed to typical supervisory, architectural, or optimizational pressures. Counterintuitively, a geometry is learned even when it is more complex than the brute-force lookup. Then, by analyzing a connection to Node2Vec, we demonstrate how the geometry stems from a spectral bias that – in contrast to prevailing theories –indeed arises naturally despite the lack of various pressures. This analysis also points out to practitioners a visible headroom to make Transformer memory more strongly geometric. We hope the geometric view of parametric memory encourages revisiting the default intuitions that guide researchers in areas like knowledge acquisition, capacity, discovery, and unlearning.
Abstract! Touched it but mostly to make sure that elements from this piece are mentioned.
Went to see Avatar. It is in fact a lot like a fireworks display. Some of the CGI of human faces is crazy good – basically no uncanny valley of any kind. And I like the themes of the series, even if it’s all a bit heavy-handed and not subtle.



You must be logged in to post a comment.